
Numerically solving initial value problems using the Euler method
The simplest algorithm to solve a system of differential equations is the Euler method. We understand the Euler method by looking into a simple heat transfer problem.
For scientific competition in geosciences, our goal is to solve or nonlinear partial differential equations of elliptic, hyperbolic, parabolic, or mixed type. We will begin by understanding the basic concepts for computationally solving initial value problems for ordinary differential equations (ODE). We can further build upon it to solve more complicated partial differential equations.
Computationally, we are required to approach the calculus problems from our high school in a slightly different manner. Whereas we have learned to take a limit in order to define a derivative or integral, in the numerical approach, we take the derivative or integral of the governing equation and go backward to define it as a difference. It will become more apparent later when we solve the problems.
Similar posts
Initial Value Problems
We begin by considering a system of differential equations of the form:
\begin{equation} \frac{d\vec{y}}{dt} = f(t,\vec{y}) \end{equation}
where \(\vec{y})\) represents the solution vector of interest, and the general function \(f\) models the specific system of interest. These form of equations explain the dynamical evolution of a given system. In many cases, we know the initial conditions of such systems:
\begin{equation} \vec{y}(0) = \vec{y}_0 \end{equation}
with \(t \in [0,T]\).
Euler method
The most straightforward algorithm to solve this system of differential equations is known as the Euler method. The assumption is that over a time-span \(\Delta t = t_{n+1} =t_n\), we can approximate the original differential equation by
\begin{equation} \frac{d\vec{y}}{dt} = f(t,\vec{y}) \implies \frac{\vec{y}_{n+1}-\vec{y}_n}{\Delta t} \approx f(t,\vec{y}) \end{equation}
From the above equation, we get
\begin{equation} \vec{y}_{n+1} = \vec{y}_n + \Delta t . f(t,\vec{y}) \end{equation}
Thus, the Euler method gives an iterative scheme by which the future values of the solution can be determined. Graphically, the slope (derivative) of a function is responsible for generating each subsequent approximation of the solution \(\vec{y}(t)\). It is important to note that the truncation error in the above equation is \(O(\Delta t^2)\)
Solving Example problem in Python
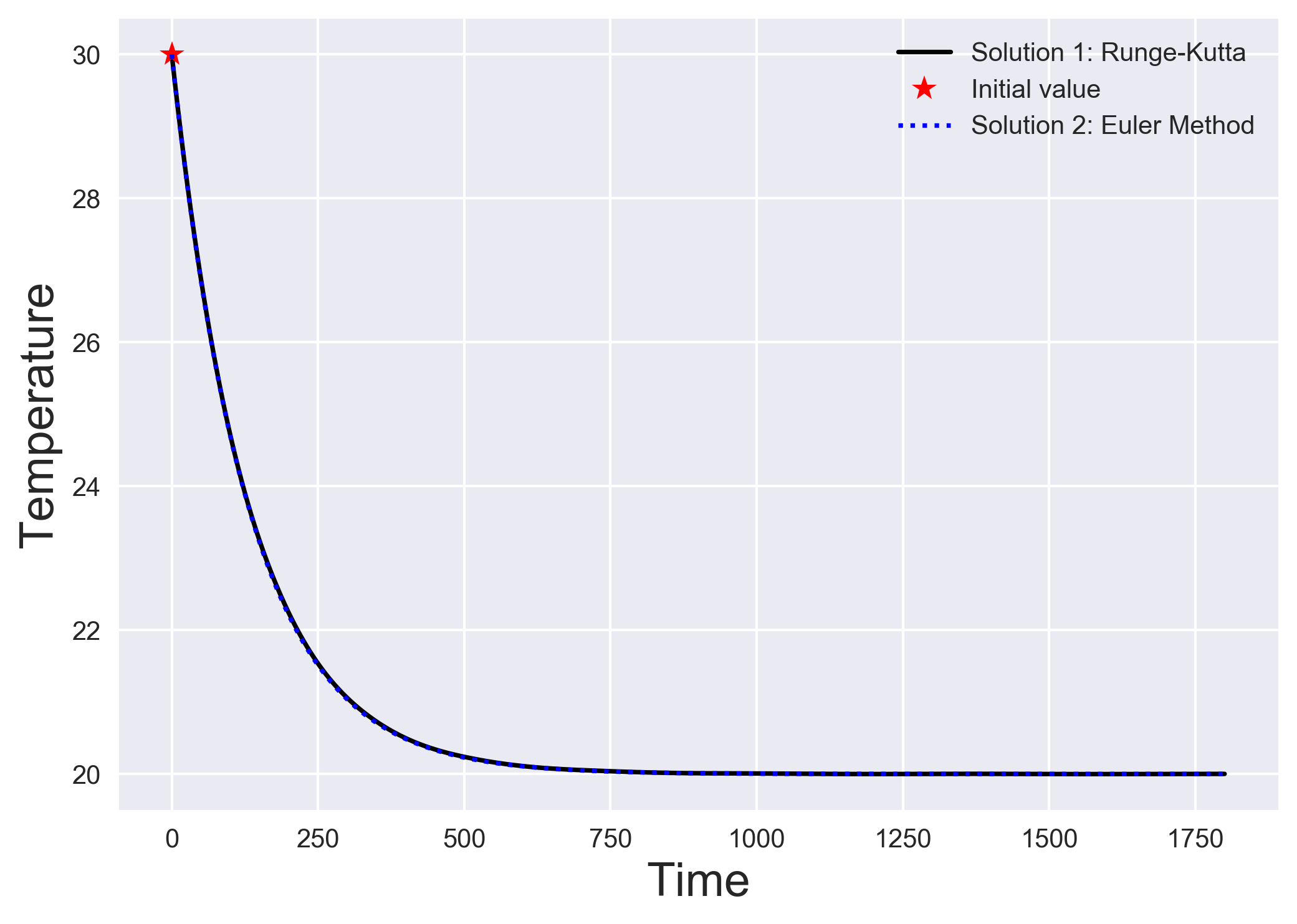
We will look into a simple heat transfer problem. We will find the temperature profile of an object in contact with a constant temperature surface through a thermal conductance. This problem is obtained from the youtube video Numerically Integrating Differential Equations in Excel and Python: Euler’s Method. The ODE of the system can be written as:
\begin{equation} \frac{dT}{dt} = -\frac{k}{c} (T-T_f) \end{equation}
where \(T_f\) is the constant temperature of the surface, \(k\) is the thermal conductance, \(c\) is the specific heat of the object, and \(T\) is the variable temperature of the object. Here, we know the temperature of the object at \(t=0\).
\begin{equation} T(0) = T_0 \end{equation}
import numpy as np
import matplotlib.pyplot as plt
from scipy. integrate import solve_ivp
plt.style.use('seaborn')
# the governing equation
def heat_equations(t, T):
k = 0.075
C = 10
T_f = 20
return -k * (T - T_f) / C
# Time steps
teval = np.linspace(0, 1800, 1000)
# ivp solver: Runge-Kutta
sol = solve_ivp(heat_equations, (teval[0], teval[-1]), (30,), t_eval=teval)
fig, ax = plt.subplots()
ax.plot(sol.t, sol.y[0, :], "-k", ms=3, label='Solution 1: Runge-Kutta')
t = 0 # initial time
T = 30 # initial temperature
ax.plot([t], [T], "*r", ms=10, label='Initial value')
# Euler method: sol 2
time = [t]
temperature = [T]
delta_t = np.diff(teval)[0] # 1.8018 for 1000 points
while t <= 1800:
T += delta_t * heat_equations(t, T)
t += delta_t
time.append(t)
temperature.append(T)
ax.plot(time, temperature, 'b:', ms=0.5, label='Solution 2: Euler Method')
ax.set_ylabel("Temperature", fontsize=18)
ax.set_xlabel("Time", fontsize=18)
plt.legend()
plt.savefig('euler_sol.png', dpi=300, bbox_inches='tight')
Conclusions
As you might have guessed, the Euler method has accuracy errors for complicated functions. This is the reason, Euler method is not used often in practice, but it is still a good starting point. In the future posts, we will look into the fourth-order Runge-Kutta method where the Taylor series local truncation error is pushed to \(O(\Delta t^5)\)
References
- Numerically Integrating Differential Equations in Excel and Python: Euler’s Method
- Kutz, J. N. (2013). Data-driven modeling & scientific computation: methods for complex systems & big data. Oxford University Press.
Disclaimer of liability
The information provided by the Earth Inversion is made available for educational purposes only.
Whilst we endeavor to keep the information up-to-date and correct. Earth Inversion makes no representations or warranties of any kind, express or implied about the completeness, accuracy, reliability, suitability or availability with respect to the website or the information, products, services or related graphics content on the website for any purpose.
UNDER NO CIRCUMSTANCE SHALL WE HAVE ANY LIABILITY TO YOU FOR ANY LOSS OR DAMAGE OF ANY KIND INCURRED AS A RESULT OF THE USE OF THE SITE OR RELIANCE ON ANY INFORMATION PROVIDED ON THE SITE. ANY RELIANCE YOU PLACED ON SUCH MATERIAL IS THEREFORE STRICTLY AT YOUR OWN RISK.
Leave a comment